

Modelo de locação de máquinas agrícolas ganha força entre agricultores
Por Fábio Schavinski, da Schavinski PD&I
05.08.2024 | 14:07 (UTC -3)

Um fator essencial para que o agricultor se mantenha competitivo no mercado é o aperfeiçoamento da atividade agrícola, a partir do uso de sistemas eficientes como a adoção de técnicas de agricultura de precisão e o uso de sistemas de orientação via satélite, os GNSS (Global Navigation Satellite Systems).
O GNSS é um conjunto de tecnologias que envolvem sistemas de posicionamento e navegação através de satélites. A utilização de piloto automático guiado por sinal de GNSS oferece recursos para aperfeiçoar a operação, com potencial redução de custos na implantação de novas culturas a partir da correta disposição das plantas no solo.
Assim, essas tecnologias associadas atuam no mapeamento da cultura, no alinhamento de plantio, diminuindo o pisoteio e aumentando o rendimento operacional das máquinas, entre outros.
Um trabalho, realizado por pesquisadores da Universidade Federal do Paraná comparou quatro diferentes grupos de sistemas associados ao plantio mecanizado de batata, avaliando seus índices de aproveitamento de área e determinando qual o mais eficiente.
O estudo foi desenvolvido na Fazenda Experimental Canguiri (FEC), pertencente à Universidade Federal do Paraná, localizada no município de Pinhais (PR). O trator utilizado foi da marca New Holland, modelo T7.260 LAR FPS – Full Powershift, com piloto hidráulico Sistema IntelliSteer, potência máxima no motor de 241cv e rotação de 1.000rpm para a semeadura. Para o experimento, foi utilizada a plantadeira Watanabe de quatro linhas, nos quatro ensaios.
Nos ensaios realizados sem o controle manual da máquina, foi utilizado o piloto automático hidráulico AFS Guide, da marca Case IH. Este sistema vem integrado com antena receptora AFS 372, monitor AFS Pro 700, e a opção do sistema de precisão RTK. O receptor RTK utilizado no ensaio foi o Trimble TDL 450h com 14 canais selecionáveis, potência configurável em 2, até 35W; à prova d'água (IP67).
A semeadura foi realizada em quatro momentos, que são representados pelas siglas: MM, MBL, PaSC e PaRTK. O ensaio MM (manual marcador) foi realizado com piloto manual e sem auxílio de equipamentos de localização via satélite, apenas o marcador de linhas de referência. O ensaio MBL (manual barras de luz) foi desenvolvido com piloto manual e com auxílio da barra de luz para o direcionamento. O ensaio PaSC (piloto automático sem correção) utilizou o piloto automático, mas não um software de correção. Por fim, no ensaio PaRTK (piloto automático RTK) foi associado o uso do piloto automático ao sistema RTK, que é o receptor GPS com o sinal de correção.

O delineamento experimental utilizado foi de blocos ao acaso, com cinco repetições. Para o planejamento das fileiras foi utilizado o software PLM Office no nível Mapping & Records. A partir da área escolhida em campo (25,6m x 111,45m), foram feitos os mapas da área de trabalho no software e criadas fileiras paralelas, com espaçamento de 0,80m entre si.
Na Tabela 1, os valores de aproveitamento indicam que os tratamentos com o piloto automático obtiveram maiores índices de aproveitamento de área do que os tratamentos que utilizaram piloto manual.
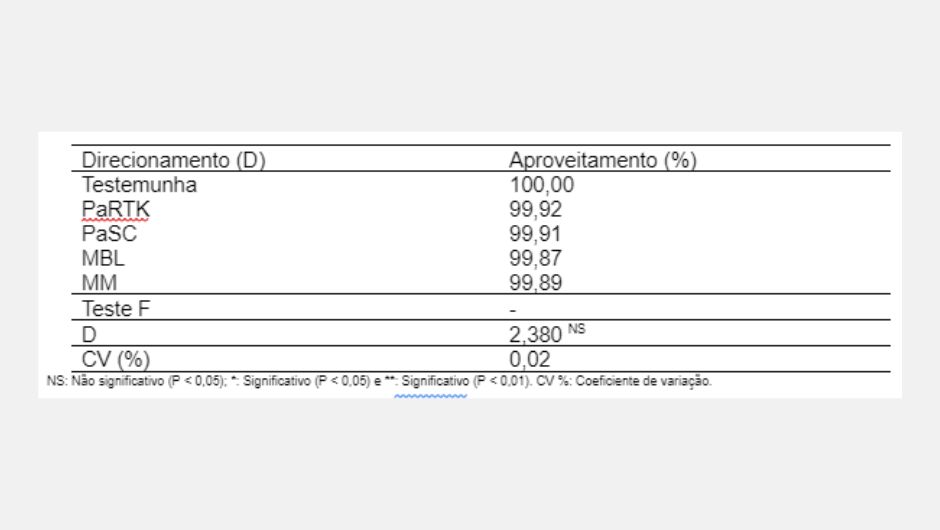
Não houve diferença significativa entre os grupos amostrais, explicada pelo pequeno tamanho da área percorrida (2.853m²).
Sabe-se que o espaçamento adequado para o plantio da babata é de 0,80m entre fileiras e 0,35m entre plantas. A equidistância entre as plantas durante a semeadura é de extrema importância, pois a falta de espaço causa competição intraespecífica, a qual pode prejudicar o desenvolvimento da cultura. Além disso, este desalinhamento gera dificuldades para as operações subsequentes, pois pode causar pisoteio das sementes posicionadas adjacentes às linhas de trânsito. Por isso, o paralelismo mostrado no grupo PaRTK (Figura 1D) é o mais apropriado para que a plantação tenha melhor desempenho produtivo. A desuniformidade das linhas de plantio foi evidente nos grupos MM (Figura 1A) e MBL (Figura 1B), que gerou redução do espaçamento adequado entre as linhas.
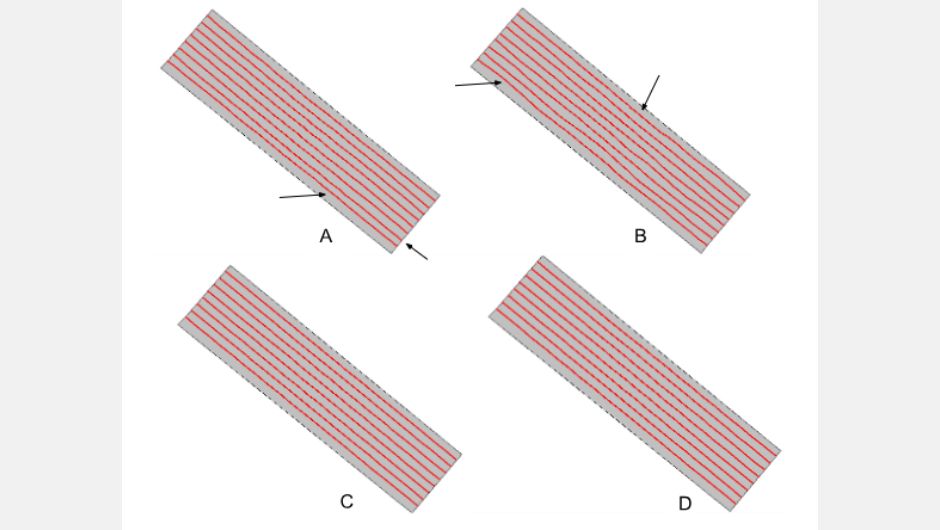
Na Figura 1 (A e B) são resultado dos grupos MM e MBL, respectivamente. Já as imagens C e D foram obtidas a partir do experimento dos grupos PaSC e PaRTK. As setas indicam alguns pontos em que foi observada falta de equidistância entre as linhas.
O planejamento foi atingir o total de 3.566,628 metros lineares. O PaRTK foi o grupo que mostrou melhor índice de aproveitamento de área (IAA) com 3.569,644 metros lineares percorridos, quando comparado aos outros, seguido do PaSC, com 3.569,664 metros lineares. Já os grupos MM (3.570,572 metros lineares) e MBL (3.571,040 metros lineares) obtiveram mais metros percorridos, quando comparados à testemunha pela distância total percorrida, e aos outros grupos que utilizaram sistema de piloto automático.
O grupo PaRTK, foi o que obteve o melhor índice de aproveitamento operacional, pela facilidade com que o trabalho pôde ser conduzido e o resultado observado pelo operador. Os principais ganhos na utilização do piloto automático foram em relação ao aumento da jornada de trabalho e à redução da mão de obra envolvida na operação.
No plantio com os grupos de controle MM e MBL houve o menor índice de aproveitamento do operador, pois exigiram maior desempenho físico e psicológico do operador, tornando-o mais suscetível a erros mesmo com o auxílio dos GNSS.
*Por Maíra Laskoski, Julio Soczki, Guilherme Luis Parize, Leonardo Leonidas Kamiecik, Thiago da Silva Xavier e Samir Paulo Jasper, da Universidade Federal do Paraná
Receba por e-mail as últimas notícias sobre agricultura


Receba por e-mail as últimas notícias sobre agricultura
Por Fábio Schavinski, da Schavinski PD&I

Deivid Sacon, Valéria C. Holtman e César M. de Oliveira (UFV); Maurício Silva Stefanelo e Guilherme Almeida Ohl (Ceres Consultoria Agronômica); Sérgio H. Brommonschenkel (UFV)


