





Fendt comemora primeiro ano de trabalho e tecnologia no Brasil
Por José Galli, diretor da Fendt América do Sul
18.06.2020 | 20:59 (UTC -3)
Estudo analisa controle fuzzy aplicado em sistema de geração de energia elétrica embarcado em tratores para o acionamento de implementos agrícolas.
A demanda do setor agrícola por maior eficiência e controlabilidade das operações realizadas por tratores e implementos impulsiona o desenvolvimento de alternativas de acionamento destas máquinas, em substituição aos sistemas mecânicos e hidráulicos amplamente difundidos no mercado. Funções como aplicações a taxas variáveis (ATV), aplicações georreferenciadas, monitoramento e controle da operação por meio de dispositivos embarcados, como sensores de produtividade, e acionamentos complexos são exemplos de aplicações que alimentam esta demanda e que estão correlacionadas com o avanço da agricultura de precisão (AP).
Nos tratores convencionais têm-se como fontes de potência para os implementos a tomada de potência mecânica (TDP) e a tomada de potência hidráulica. Com a proposta de utilização de acionamentos elétricos, surge a necessidade de desenvolvimento de uma nova fonte de potência, a tomada de potência elétrica (TDPE). Ao contrário da TDP, uma TDPE pode eliminar a relação de dependência entre o acionamento do implemento e a velocidade angular do motor diesel, tradicionalmente utilizado nos tratores agrícolas, possibilitando, ainda, a utilização de sistemas de controle eletrônico.

A geração de energia elétrica em tratores é algo que já vem sendo explorado por fabricantes há décadas. As primeiras vertentes são do início da década de 1950. Em 1954 a empresa International Harvester lançou o trator agrícola Farmall 400 Electrall que dispunha, opcionalmente, de um gerador elétrico trifásico (208Vca; 10kW) com o propósito de suprir com energia elétrica o acionamento de implementos e pequenas redes rurais.
Um exemplo moderno da evolução do uso de energia elétrica é o trator RigiTrac EWD 120 - Diesel Electric, da empresa Rigitrac Traktorenbau AG, desenvolvido em conjunto com a Technische Universität Dresden, em 2011. O trator possui um sistema de propulsão diesel elétrico composto por um motor diesel de 91kW, um gerador de energia elétrica de 85kW e 650Vcc e quatro motores elétricos, um em cada roda motora, com potência nominal de 33kW cada.
Atualmente existem três categorias de tratores que carregam a tecnologia de sistemas elétricos: (a) o diesel elétrico, com o sistema de geração acoplado diretamente ao motor e destinado principalmente ao uso da potência elétrica na tração; (b) o totalmente elétrico, alimentado por baterias ou células de hidrogênio, porém, ainda fora do mercado devido a limitações decorrentes das tecnologias disponíveis; e (c) o trator diesel com gerador de corrente contínua integrado, que dispõe de uma TDPE de baixa potência, mas não destinada exclusivamente ao uso em implementos.

Apresentaremos a seguir um sistema de geração de energia elétrica embarcado e acionado pela TDP do trator. O objetivo é validar a viabilidade operacional do controlador, projetado para regular a tensão gerada no sistema. Para o seu funcionamento, o sistema deve ser capaz de operar frente a variações simultâneas da potência de carga demandada e da velocidade angular de acionamento, mantendo a energia gerada dentro dos limites estabelecidos. O sistema proposto e seus principais componentes são mostrados na Figura 1, sendo: TDP, tomada de potência mecânica do trator; GS, gerador síncrono; w, velocidade angular do rotor do GS; Inversor de Frequência (onde PWM é modulação por largura de pulso); Vfd, tensão no circuito de campo do GS; Vdc, tensão no barramento DC do circuito inversor de frequência; Po, potência de carga.
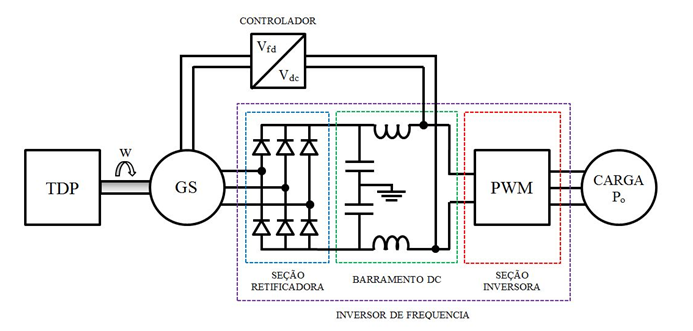
Pode-se observar que o gerador sincrônico é acionado pelo eixo da tomada de potência mecânica do trator, enquanto as três fases estão ligadas a um circuito inversor de frequência que fornece a alimentação para a carga, podendo ser um implemento elétrico, ou outra carga compatível. Os parâmetros do GS, necessários para a modelagem matemática do sistema, foram baseados em um modelo de gerador síncrono trifásico de polos salientes, com os valores nominais de tensão de 380Vca, frequência de 60 Hz, potência de 20kW e velocidade angular de 188,5rad/s (1.800rpm), do fabricante WEG, modelo GTA161AI22.
A construção e a parametrização do sistema proposto, bem como o projeto e os testes com o controlador fuzzy, foram realizados por meio de simulações computacionais, utilizando o programa Matlab/Simulink.
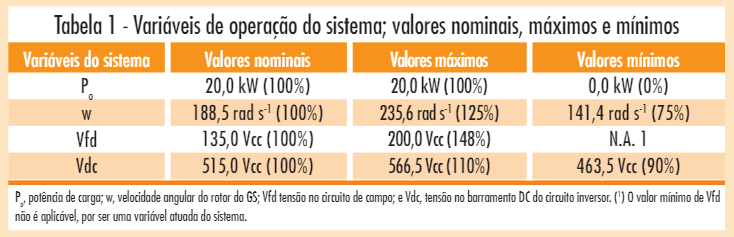
Na Tabela 1 são apresentados os valores nominais e os valores máximos e mínimos atribuídos às variáveis, baseando-se no gerador síncrono de 20kW adotado.
Para o sistema proposto, optou-se pela utilização de um controlador fuzzy. No sistema, potência de carga e velocidade angular do motor são as variáveis independentes do sistema; tensão no circuito de campo a variável atua da tensão do barramento DC do circuito inversor à variável controlada, cujo comportamento determina a correta operação do sistema. Os controladores fuzzy são classificados como inteligentes. Controladores inteligentes são capazes de realizar decisões de operação baseadas nas variáveis de trabalho e para isso se utilizam de instruções ou regras. Diferentemente de um controlador proporcional integral derivativo (PID), o controlador fuzzy também é capaz de absorver a dinâmica complexa do sistema (não linearidades) e atuar numa ampla faixa de operação, características necessárias para o controle do sistema proposto.
A Figura 2 ilustra os distúrbios em velocidade angular e na potência de carga aplicados nas simulações do sistema de geração, para o ajuste dos controladores.
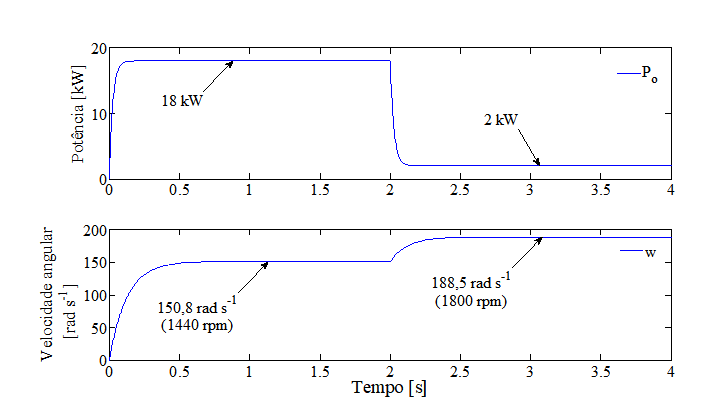
Na Figura 2, os distúrbios adotados simulam a partida do sistema em estado zero até um patamar elevado de carga, com o sistema operando abaixo da velocidade angular nominal de acionamento, seguido pelo alívio da carga e aumento da velocidade angular de acionamento. Adotou-se esta sequência porque nela ocorrem variações simultâneas de velocidade angular e na potência de carga em dois cenários críticos para a operação do sistema.
Para a avaliação dos controladores foram avaliados os índices de desempenho: integral do erro absoluto (IAE) e integral do erro absoluto ponderado pelo tempo (Itae). Os índices foram calculados com os valores normalizados do erro de Vdc e o tempo na unidade dos segundos (s), registrados num mesmo período de simulação.
A Figura 3 ilustra os valores registrados de tensão no barramento DC do circuito inversor nas simulações do sistema com os controladores obtidos. Controladores Miso possuem múltiplas variáveis de entrada e uma variável de saída, enquanto os controladores Simo possuem uma entrada e múltiplas saídas. As curvas correspondentes aos controladores fuzzy PID Miso aparecem sobrepostas.
Na Tabela 2 são apresentados os índices de desempenho IAE e Itae dos controladores fuzzy e o número de regras utilizadas.
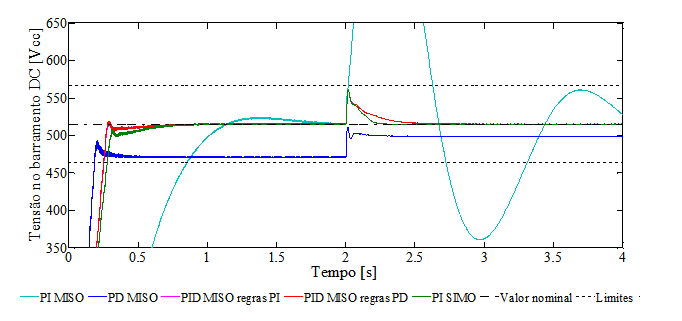
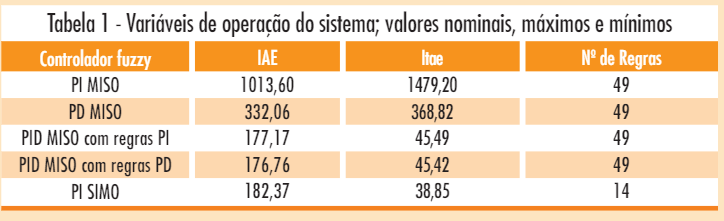
Com os resultados obtidos, pode-se observar que ambas as arquiteturas de controle fuzzy PID Miso e fuzzy PI Simo mantiveram tensão no barramento DC do circuito inversor em seu valor nominal, obtendo valores próximos de desempenho, enquanto as demais apresentaram erros grosseiros durante regime e na transição da potência de carga (instantes de 2s). O controlador selecionado é o fuzzy PI Simo, que manteve o sistema operando nos limites estabelecidos, utilizando-se de uma arquitetura mais simples, com uma única variável de entrada e número reduzido de regras. Finalmente, os resultados demonstraram a capacidade operacional do sistema frente a distúrbios de carga e de velocidade de acionamento, mantendo a tensão no barramento DC dentro dos limites estabelecidos.
Fabricio Theodoro Soares, Nelson Luis Cappelli, Angel Pontin Garcia e Claudio Kiyoshi Umezu, Feagri - Unicamp
Artigo publicado na edição 164 da Cultivar Máquinas.
Receba por e-mail as últimas notícias sobre agricultura


Receba por e-mail as últimas notícias sobre agricultura



