Uso de sistema de navegação global por satélites na agricultura
O uso do sistema de navegação global por satélites na agricultura possibilita um grande salto no modo de conduzir as culturas
21.09.2020 | 20:59 (UTC -3)
Revista Cultivar
O instrumento mais antigo criado para ajudar o homem na localização e navegação foi a bússola, no século 11. Essa criação chinesa foi um marco para a navegação marítima. Outro momento muito importante para o desenvolvimento das técnicas de navegação foi durante a Segunda Guerra Mundial, quando o homem ampliou muito seu domínio sobre as ondas via rádio, desenvolvendo a radionavegação, porém os sistemas de localização dessa época ainda não permitiam obter o posicionamento global e mudanças no relevo ou interferências eletrônicas prejudicavam sua exatidão.
Após a criação de diversas tecnologias, surgiram na década de 1970 os primeiros sistemas de posicionamento por satélites com cobertura global, denominados de GNSS (Global Navigation Satellite Systems – Sistemas de Navegação Global por Satélites). O primeiro destes foi o Navstar GPS, ou apenas GPS (Global Positioning System - Sistema de Posicionamento Global), sistema americano, que por ser o primeiro e mais famoso, erroneamente utilizamos o termo GPS para descrever qualquer GNSS. Além do sistema americano, também na década de 1970, surgiu o sistema russo denominado Glonass (atualmente operante) e na década de 2000, o Galileo, da União Europeia, e o chinês BeiDou, ambos em fase final de desenvolvimento.
O GNSS é composto, de maneira geral, por três segmentos: 1) segmento espacial, composto por diversos satélites em órbita na Terra; 2) estações de controle em solo para monitoramento das órbitas dos satélites e seus relógios internos (atômicos), corrigindo ao menos duas vezes ao dia quaisquer divergências; e 3) segmento de usuários, o qual é composto pelos receptores usados para as mais diversas funções. Esses receptores têm a função de decodificar as informações oriundas dos satélites e, por meio de cálculos, fornecer a localização do usuário. Altamente difundidos, os equipamentos GNSS são muito utilizados na agricultura para a navegação a um determinado ponto na lavoura, gestão remota de máquinas, piloto automático e inúmeras outras funções.
Sistema RTK garante maior precisão da localização
FUNCIONAMENTO
No caso do sistema GPS, os satélites emitem ondas de rádio chamadas bandas “L1” e “L2”, de frequências 1.575,42MHz e 1.227,60MHz, respectivamente. A banda L1 é portadora dos códigos de “Aquisição grosseira” (Coarse Acquisition – C/A) e “Preciso” (Precise - P), enquanto L2 traz apenas o código “Preciso” (P). Ambas as bandas são moduladas de forma binária, contendo informações do satélite e o momento exato que foram emitidas, determinado pelos seus relógios atômicos internos. O receptor, com essas informações, calcula o tempo (t) que a onda demorou para chegar até sua antena receptora. Conhecendo a velocidade dessas ondas (c), a da luz, podemos calcular a distância (d) entre o receptor e o satélite (d = c * t).
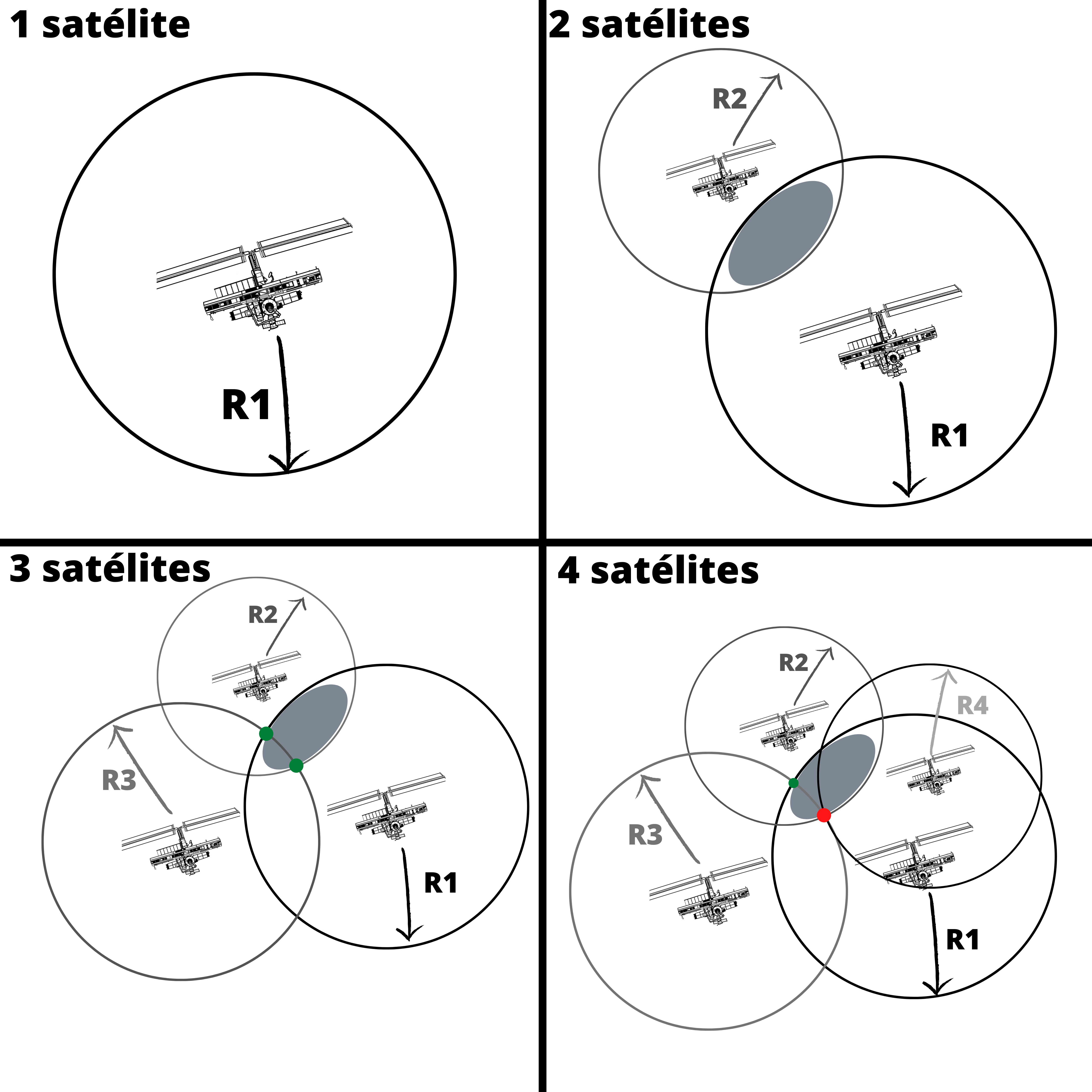
Com a distância e a posição do satélite no espaço, forma-se uma esfera imaginária de raio R1, assim como visto na Figura 1, a qual o receptor pode estar em relação ao satélite. Com um segundo satélite tem-se outra esfera de raio R2 e então a intersecção das esferas R1 e R2 forma uma circunferência de possível posição do receptor. Adicionando um terceiro satélite, sua respectiva esfera R3 intercepta a circunferência, gerando dois pontos possíveis. Por fim, com um quarto satélite e sua esfera R4, encontra-se uma única posição onde o usuário deve estar, determinando assim sua longitude, latitude e altitude.
Cabe ressaltar que quanto mais afastados entre si os satélites, melhor a qualidade da triangulação realizada. A precisão associada a tal distanciamento é chamada de DOP (Dilution of Precision – Diluição da Precisão), podendo ser expressada de diferentes formas, como a HDOP que diz respeito à diluição da precisão horizontal, a VDOP relativa à precisão vertical e a PDOP, correspondente à precisão nas três dimensões.
EXATIDÃO NO POSICIONAMENTO
A exatidão da localização depende do receptor, pela qualidade de sua fabricação, pelo código digital que é utilizado, podendo ser somente (C/A) ou (C/A) junto de (P), além de seu uso, militar ou civil. Há ainda fatores que causam erros no posicionamento como a perda ou a degradação do sinal, erro nos relógios e desvio dos satélites de suas órbitas. A Ionosfera e a Troposfera, camadas da Atmosfera, possuem partículas carregadas eletricamente e partículas de água, respectivamente. Quando a onda de rádio encontra essas, sofre redução em sua velocidade, levando a erro no posicionamento.
O erro nos relógios faz com que haja um equívoco no cálculo do tempo percorrido pela onda, gerando uma distância satélite-receptor incorreta. As forças gravitacionais da Lua e do Sol “puxam” os satélites, desviando-os de sua órbita planejada; fatores esses que causam um erro no posicionamento de, segundo o governo americano, 3m horizontais e 5m verticais para receptores C/A, desconsiderando erros do próprio receptor. Por fim, edifícios e montanhas refletem as ondas e causam os mais variados erros no posicionamento, entretanto para a agricultura não costumam ser um problema, mas árvores, rios e lagos, sim.
Figura 1 - Triangulação a partir de 4 satélites permitem o cálculo da posição do receptor GNSS (ponto vermelho). (Fonte: dos autores)
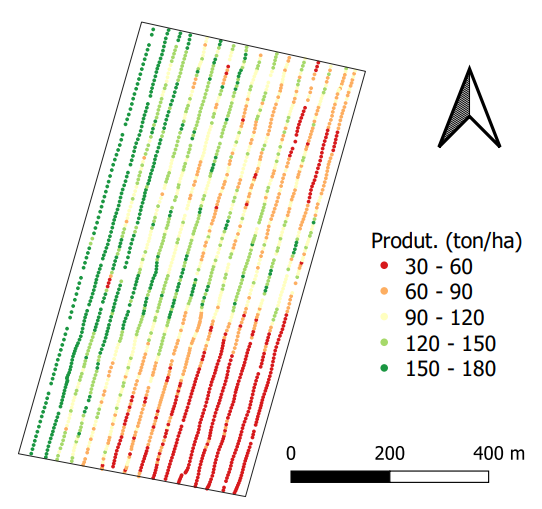
Figura 2 - Dados de produtividade de parte de um talhão de cana-de-açúcar. (Fonte: dos autores)
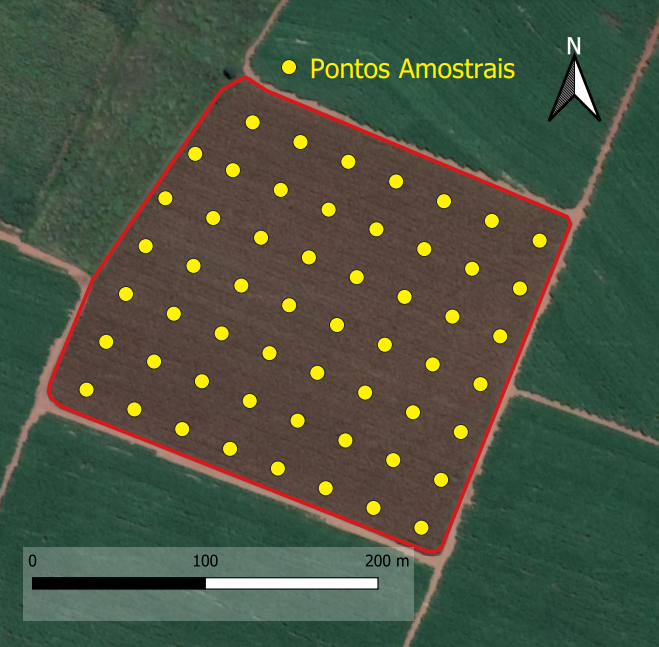
Figura 3 - Exemplo de grade amostral, onde cada ponto amarelo representa uma amostra de solo composta que será enviada para laboratório. (Fonte: dos autores)
CORREÇÃO DE SINAIS
Em diversas operações agrícolas, como no direcionamento de máquinas, receptores comuns (código C/A), com erros de 3m (horizontais) no posicionamento, são indesejados. Por isso empregam-se receptores mais precisos que utilizam as duas frequências, L1(C/A e P) e L2(P), garantindo precisão submétrica e, se submetidos à correção diferencial de sinal, podem chegar a exatidão na ordem de 2cm a 3cm. A correção diferencial costuma ser empregada nos sistemas de piloto automático, principalmente, garantindo com que a máquina passe no local correto, evitando problemas como alteração do espaçamento entre linhas de semeadura, pisoteio de linhas de plantio, falhas de aplicação, entre outros.
O sistema mais famoso de correção é o RTK (Real-Time Kinematic), o qual utiliza uma antena móvel (denominada “base”), colocada em coordenadas conhecidas (marco geodésico ou estação móvel), a qual sintoniza os mesmos satélites do receptor e compara as coordenadas conhecidas com as calculadas pelo GNSS, enviando os dados de erro ao receptor (chamado de rover), o que aumenta sua exatidão na estimativa de sua posição no terreno. Geralmente essa informação de correção é transmitida por link de comunicação via rádio, o qual apresenta limitação de distância de 20km em visada direta.
Contudo, para reduzir problemas de comunicação devido ao relevo acidentado ou distâncias maiores entre base e rover, é possível a utilização de repetidores de sinal de rádio. Porém, ressalva importante é que quanto mais distante a base estiver do rover, menor será a eficiência do sistema de correção, uma vez que as condições atmosféricas e climáticas podem variar significativamente entre a posição da base e do rover, assim como diferentes satélites serem sintonizados por eles.
Sistema semelhante de correção de sinal pode utilizar satélites geoestacionários para transmitir a informação de correção da posição ao invés de um link de rádio, tecnologia esta que recebe o nome genérico de SBAS (Satellite based augmentation system). Esse tipo de correção é geralmente provido por empresas que comercializam receptores GNSS e podem ou não cobrar algum valor para liberar o código de correção nos diversos níveis disponíveis. A principal vantagem, nesse caso, é que o usuário (agricultor) não precisa se preocupar com a manutenção das bases de referência do RTK.
Aplicações de GNSS na agricultura
O GNSS é componente essencial das tecnologias para direcionamento de máquinas agrícolas comercialmente disponíveis, isto é, barra de luz e piloto automático. As barras de luzes apareceram em 1995 na aviação agrícola, principalmente para a aplicação de agroquímicos. Esse sistema consiste em um receptor GNSS que usa a definição de uma linha de trabalho a partir de uma primeira passada e da largura de trabalho da máquina, definindo, assim, linhas paralelas a serem seguidas pelo operador da máquina. Para tal, as luzes de uma barra de LEDs (daí o nome barra de luz) se acendem conforme a máquina desvia das linhas programadas, indicando ao operador a direção a se tomar para corrigir a trajetória. Tal sistema é muito utilizado em adubadoras a lanço e pulverizadores.
Tecnologia mais exata que a barra de luz é o direcionamento de máquinas por meio do sistema de piloto automático, uma vez que não depende do operador para direcionar a máquina durante a operação na lavoura. Esse controle pode ser feito por atuadores eletro-hidráulicos diretamente nas rodas, por um motor na coluna de direção ou mesmo por atrito, onde um motor encostado no volante rotaciona o mesmo. Com isso, o operador da máquina pode monitorar as outras funções e os ajustes da máquina, geralmente tomando o controle apenas nas manobras de cabeceira.
No âmbito da agricultura de precisão, o GNSS tem papel fundamental. Um exemplo disso é no monitoramento da produtividade das culturas. Em conjunto a sensores acoplados nas colhedoras, o GNSS permite georreferenciar a produção da cultura ao longo das áreas, permitindo a confecção de mapas de produtividade como o da Figura 2. Essa informação é importante para a identificação dos fatores limitantes à produção das plantas e pode ter papel fundamental na tomada de decisão de manejo localizado seguindo os preceitos da agricultura de precisão.
Outro grande uso de GNSS na agricultura de precisão é a amostragem georreferenciada de plantas, pragas ou solo. Ou seja, a coleta de amostras, geralmente em grade, ilustrada na Figura 3, as quais possuem localização definida por GNSS, possibilitando, para o caso da amostragem de solos, a geração de mapas de fertilidade do solo e, assim, a adubação em doses variadas.
João Vítor Fiolo Pozzuto, Joaquim Pedro de Lima, Thiago Luis Brasco, Lucas Rios do Amaral, FEAGRI/UNICAMP
Compartilhar
Newsletter Cultivar
Receba por e-mail as últimas notícias sobre agricultura
Newsletter Cultivar
Receba por e-mail as últimas notícias sobre agricultura